-
 CorrGeom: Correcció geomètrica de fitxers ràster i vectorials
CorrGeom: Correcció geomètrica de fitxers ràster i vectorials
Accés directe de l'ajuda a Internet: CorrGeom
Accés a l'aplicació des del menú:
"Eines | Geometria | Correccions elementals (translació, rotació, etc)"
"Eines | Geometria | Correccions polinòmiques de ràsters i vectors"
"Eines | Geometria | Generació d'ortoimatges espacials"
"Eines | Geometria | Generació d'ortofotos"
Presentació i opcions
Introducció
La cartografia convencional sobre paper ens ofereix una enorme font d'informació per a incorporar en el si d'un Sistema d'Informació Geogràfica (SIG). Tot i que cada cop més la cartografia es genera digitalment en origen, encara hi ha molts casos en què no disposem dels fitxers digitals, bé sigui perquè es tracta d'un document d'una certa antiguitat, bé sigui perquè s'ha elaborat amb tècniques convencionals analògiques, o simplement perquè no tenim accés a la informació digital original.
En aquests casos, tot i que la digitalització en taula és una possibilitat factible, representa un esforç fatigós i una pèrdua de detall respecte a la possibilitat d'escannejar el document analògic i procedir a la seva digitalització sobre la pantalla de l'ordinador.
MiraMon permet transformar fitxers procedents de pràcticament qualsevol escànner (formats BMP, TIFF, JPG, etc) a format IMG o JPG (si no ho eren en origen). Un cop en aquest format podrem digitalitzar al damunt les corbes de nivell, carreteres, polígons d'usos del sòl, etc i convertir-los en capes vectorials. Tanmateix, els documents escannejats no estan encara georeferenciats, amb la qual cosa si digitalitzem directament sobre ells, les coordenades dels vectors resultants seran en unitats arbitràries (píxels) del sistema d'escanneig i no en unitats mapa del sistema de destí (per exemple en metres del sistema UTM). Tot i que és possible procedir així i georeferenciar posteriorment el document vectorial resultant amb el programa CorrGeom de MiraMon, resulta aconsellable de georeferenciar el ràster i procedir posteriorment a la digitalització, ja que si escannegem el full per fragments es podran mosaicar amb precisió els resultats i, a més, en qualsevol moment podem sobreimposar al document escannejat altres capes d'informació vectorial de què disposem per tal que ens serveixin de referència. La georeferenciació dels ràsters escannejats també s'efectua des del programa CorrGeom de MiraMon. En resum, doncs, tenim dues alternatives per a la introducció al nostre SIG de capes vectorials a partir de documents en paper escannejats i el programa CorrGeom de MiraMon:
- Escannejat -> Digitalització -> Georeferenciació dels vectors
- Escannejat -> Georeferenciació del ràster ->Digitalització (ACONSELLAT)
En tots dos casos el mètode aconsellat és l'ajust polinòmic de primer grau. En el cas molt poc probable amb els escànners moderns, que la imatge escannejada presenti deformacions quadràtiques, utilitzeu un ajust polinòmic de segon grau.
Per altra banda, existeixen altres fonts d'informació molt interessants per a ser incorporades en el nostre SIG: es tracta de capes ràster com ara les imatges de teledetecció i les fotografies aèries. Aquests materials poden ser obtinguts directament en format digital (cas de la majoria d'imatges de teledetecció) o bé, si venen sobre un suport de paper o fotogràfic (cas de les fotografies aèries convencionals), es poden escannejar i convertir-les així en una imatge digital.
Les imatges de teledetecció presenten una sèrie de deformacions geomètriques produïdes per la rotació i curvatura de la Terra, l'òrbita de la plataforma, etc. El programa CorrGeom de MiraMon permet corregir aquestes imatges mitjançant les tècniques convencionals basades en polinomis de primer i segon grau. En el cas de les fotografies aèries i de les imatges de teledetecció d'un cert detall (píxel de 50 m o menor) és aconsellable efectuar la correcció tenint en compte el relleu terrestre. CorrGeom ofereix els mètodes "ajust polinòmic amb zetes" per a imatges de satèl·lit amb mides de píxel petites (Landsat TM, SPOT XS i P, IRS LISS, etc) i "ajust mitjançant equacions de col·linealitat" per a fotografia aèria, mètode que aplica les equacions fonamentals de la fotogrametria. Aquestes imatges corregides geomètricament utilitzant el relleu a través d'un Model Digital d'Elevacions (MDE) s'anomenen ortoimatges (i ortofotos en el cas de fotografia aèria).
El programa CorrGeom, doncs, permet corregir aquestes deformacions (òrbita de les plataformes, relleu terrestre, etc) i adaptar les imatges a un sistema de projecció cartogràfica conegut, com ara l'UTM. Un cop en el sistema de projecció adequat, les imatges podran ser superposades a altres imatges i a capes vectorials en el mateix sistema de projecció.
Tant per corregir ràsters com vectors habitualment cal disposar d'un conjunt de punts de control sobre el terreny (GCP) els quals ens indiquen diverses coordenades en el sistema de referència origen (no corregit) i destí (corregit). Els GCP es podem entrar amb un editor de textos o es poden digitalitzar amb MiraMon com a punts i convertir-los en GCP amb VECCOR (vegeu més avall).
En el cas d'imatges captades des d'un sistema que conegui amb prou exactitud la posició i actitud del sensor (GPS+INS) pot arribar-se a fer la correcció sense GCP.
Per a una major fiabilitat estadística del procés de correcció geomètrica, CorrGeom permet que el fitxer de punts de control contingui dos subconjunts de punts, un que s'utilitza per a efectuar els ajustos de les equacions de correcció, i un altre, que anomenem punts de test, que s'utilitza per a estimar l'error amb un conjunt independent de punts. Per a tots dos conjunts de punts, CorrGeom proporciona l'error RMS en X, Y i global per a cada punt així com pel conjunt de punt de control. Lògicament, si només es donen punts d'ajust també només es proporcionen aquests RMS per al conjunt de punts de l'ajust.
Si voleu canviar el sistema de projecció de ràsters o vectors, un cop georeferenciats amb MiraMon (o bé ja georeferenciats en origen i importats a MiraMon), utilitzeu el programa CanviPrj. No confongueu, doncs, la funcionalitat de CorrGeom que permet georeferenciar una capa no georeferenciada amb CanviPrj que permet reprojectar una capa de la qual ja coneixem la georeferenciació.
NOTES:
- Quan parlem de sistema de projecció ens referirem a UTM, Lambert, etc, mentre que quan parlem de sistema de referència ens referirem a UTM-31N-UB/ICC (UTM en el fus 31, l'hemisferi Nord, dàtum europeu ED50 amb paràmetres ajustats per UB/ICC), o Goode_Homolosine-WGS84 (Goode Homolosine WGS84 amb dàtum WGS 1984), etc (vegeu l'ajuda Geodesia per a més informació).
- D'ara en endavant ens referirem a les imatges i vectors que han estat adaptats a algun sistema de referència utilitzant CorrGeom com a "corregits".
CorrGeom
L'aplicació CorrGeom permet corregir geomètricament ràsters (IMG i JPG: imatges de satèl·lit, fotografia aèria, mapes escannejats...) o capes vectorials (VEC, PNT, ARC i els seus derivats POL i NOD) a partir de n punts de control dels quals es coneixen:
- Coordenades en el sistema de referència origen (sistema "no corregit"), p.ex. en unitats píxels, amb origen típicament (0,0) al vèrtex inferior esquerre- en els ràsters, o p. ex. en cm en una fitxer provinent d'una digitalització vectorial d'un mapa de paper efectuada sobre una taula digitalitzadora calibrada a unitats cm de paper. Anomenarem aquestes coordenades, coordenades en el sistema de referència origen: X_SistOri, Y_SistOri.
- Coordenades en el sistema de referència escollit (sistema "corregit" o "mapa", com ara UTM-31N). Aquestes coordenades es determinen manualment amb l'ajut de mapes de paper, sobre la pantalla amb altres mapes digitals, amb GPS sobre el terreny, etc. Anomenarem a aquestes coordenades, coordenades en el sistema de referència destí: X_SistDest, Y_SistDest [, Z_SistDest].
A més a més el programa permet aplicar transformacions afins (translacions, rotacions, inclinacions, escalats i miralls) i una perspectiva tant a ràsters com a vectors.
En el cas de que desitgeu corregir o transformar totes les bandes d'un ràster multibanda (típicament una RGB de 24 bits o una imatge satèl·lit multispectral) podeu indicar-li al programa, amb el paràmetre /MULTIBANDA o activant el botó corresponent que les corregeixi totes en una sola execució i el resultat continuarà essent un ràster multibanda. En aquest cas, aconsellem editar els punts de control sobre la banda amb major resolució. Si la correcció necessita del model digital d'elevacions (MDE), en el cas que les diferents bandes a corregir tinguin diferents costats de píxel, podem usar un MDE multibanda amb tantes bandes com diferents costats de píxel activant el paràmetre /MDE_MULTIBANDA.
Es pot efectuar la correcció per diferents mètodes:
Ajust polinòmic de primer grau (cas ràster):
En aquest cas, el mètode no considera les zetes (elevacions). És típic per a corregir fitxers ràsters amb poca deformació, com ara imatges, i mapes escannejats ja corregits (com ortofotos o mapes topogràfics) o imatges de satèl·lit de zones amb poc relleu, abast territorial moderat i píxel relativament gros respecte a l'alçada de vol del satèl·lit. L'aplicació d'aquests mètodes a fotografies aèries escannejades o imatges de satèl·lit de relatiu detall (com ara Landsat-TM o SPOT) i extensió només és adequada en zones de relleu pla si es vol obtenir cartografia d'alta qualitat geomètrica.
Ajust polinòmic de primer grau (cas vectorial):
En aquest cas, el mètode no considera les zetes (elevacions). És típic per a corregir fitxers vectorials amb poca deformació.
Ajust polinòmic de segon grau (cas ràster):
En aquest cas, el mètode no considera les zetes (elevacions). És típic per a corregir fitxers ràster amb poca deformació, com ara imatges, i mapes escannejats ja corregits (com ortofotos o mapes topogràfics) o imatges de satèl·lit de zones amb poc relleu, abast territorial moderat i píxel relativament gros respecte a l'alçada de vol del satèl·lit. L'aplicació d'aquests mètodes a fotografies aèries escannejades o imatges de satèl·lit de relatiu detall (com ara Landsat-TM o SPOT) i extensió només és adequada en zones de relleu pla si es vol obtenir cartografia d'alta qualitat geomètrica.
Ajust amb polinomi amb Z per a les columnes i polinomi de 1r grau sense Z per a les files:
En el cas de l'ajust amb polinomi amb Z per a les columnes i polinomi de 1r grau sense Z per a les files, l'ajust de les columnes es fa utilitzant un polinomi que té en compte simultàniament X, Y i Z. Pel que fa a les files, es pot fer de tres maneres diferents: considerant que no hi ha capcineig del sensor durant la presa de la imatge, considerant, que el capcineig és constant o, considerant que és variable segons un model lineal. Per a més detall es pot consultar:
Palà, V., Pons, X. (1995) Incorporation of relief into geometric corrections based on polynomials. Photogrammetric Engineering & Remote Sensing, 61(7):935-944.
Ajust amb polinomi amb Z per a les columnes amb capcineig constant i polinomi de 1r grau amb Z per a les files:
En aquest cas, anàleg a l'anterior però amb capcineig constant i polinomi de 1r grau amb Z per a les files, l'ajust de les columnes es fa utilitzant un polinomi que té en compte simultàniament X, Y i Z. Pel que fa a les files, es pot fer de tres maneres diferents: considerant que no hi ha capcineig del sensor durant la presa de la imatge, considerant, que el capcineig és constant o, considerant que és variable segons un model lineal. Per a més detall es pot consultar:
Palà, V., Pons, X. (1995) Incorporation of relief into geometric corrections based on polynomials. Photogrammetric Engineering & Remote Sensing, 61(7):935-944.
Ajust amb polinomi amb Z per a les columnes amb capcineig variable i polinomi de 1r grau amb Z per a les files:
En aquest cas, anàleg a l'anterior amb capcineig variable, l'ajust de les columnes es fa utilitzant un polinomi que té en compte simultàniament X, Y i Z. Pel que fa a les files, es pot fer de tres maneres diferents: considerant que no hi ha capcineig del sensor durant la presa de la imatge, considerant, que el capcineig és constant o, considerant que és variable segons un model lineal. Per a més detall es pot consultar:
Palà, V., Pons, X. (1995) Incorporation of relief into geometric corrections based on polynomials. Photogrammetric Engineering & Remote Sensing, 61(7):935-944.
Ajust mitjançant equacions de col·linealitat:
Els paràmetres implicats en les equacions de col·linealitat són: posició (Xc, Yc, Zc) i actitud (omega, fi, kappa) de la cambra o sensor, focal de la cambra (f) i coordenades del punt principal (x_pp, y_pp) de la imatge. D'aquests paràmetres, l'usuari pot decidir quins cal ajustar i quins venen fixats. Sobre els que cal ajustar, és útil donar uns paràmetres estimats que ajuden al programa a convergir més ràpidament. En algun cas, si el paràmetre inicial és totalment desconegut o l'estimació és poc adequada, pot ser que el sistema no convergeixi vers cap solució o que trobi unes solucions poc satisfactòries. Si es coneixen i es fixen tots els paràmetres, s'aplica la transformació sense tenir en compte els punts de control i usant els punts de test per a avaluar l'error de l'ajust. Aquest són els valors inicials dels paràmetres de vol en la primera iteració:- Aleteig: omega = 0
- Capcineig: fi = 0
- Deriva: kappa = Es proven diferents valors i s'agafa el que doni un RMS més petit en les primeres iteracions.
- Xc = Mitjana de les coordenades X (destí) dels punts de control.
- Yc = Mitjana de les coordenades Y (destí) dels punts de control.
- Zc = Zc mitjana + altitud de vol, aprox. 2000-3000 m.
Quan s'hagi d'ajustar el punt principal (x_pp, y_pp), el programa pren com a valors inicials:- x_pp = Mitjana de les coordenades x (origen) del punts de control o punt mitjà del ràster.
- y_pp = Mitjana de les coordenades y (origen) del punts de control o punt mitjà del ràster.
Tanmateix, algunes vegades aquestes mitjanes poden quedar força allunyades del punt principal real i en aquest cas el programa pot no convergir (p.ex. si s'escanneja només un fragment lateral d'una fotografia aèria analògica). El programa ofereix a l'usuari la possibilitat de canviar el valor per un altre estimat a ull en l'encreuament de les marques fiducials; tingueu en compte que heu d'usar sempre el mateix sistema de medició, coherent amb les coordenades del sistema de referència origen.
Per a l'ajust de la focal, cal triar un valor inicial proper al real, típicament entre 15 i 35 mm per a càmeres digitals i entre 50 i 250 mm per càmeres analògiques.
Addicionalment caldrà saber els punts per polzada (ppp o dpi) d'escanneig de la imatge (1 polzada = 25.4 mm). En el cas de fotografies analògiques són valors freqüents entre 400 i 200 dpi. En fotografies digitals convindrà consultar les especificacions tècniques (per exemple la càmera AA497-AMDC 28.0 de 2024 columnes x 2041 files i mida del sensor de 18x18 mm dóna lloc a una resolució de 2811x2835 dpi).
Transformacions geomètriques (afins i perspectiva) (cas ràster):
Aquests tipus de transformacions segueixen una filosofia diferent a les anteriors: en lloc d'ajustar la transformació a través d'uns punts de control, volem indicar nosaltres els paràmetres de la transformació ja que els coneixem a priori. Així, pot ser que haguem escannejat un document girat 90º per causa de caber-hi més bé a l'escànner un cop rotat; en aquest cas serà més fàcil indicar que volem efectuar una rotació de 90º per tornar-lo a posar en la posició original i veure'l de forma "natural" (potser abans de col·locar punts de control per a un ajust fi de la geometria). Un segon exemple seria disposar d'una base en què les unitats del sistema de referència horitzontal son km i volem tenir-les en m, per a la qual cosa aplicarem un escalat de valor 1000.
Els tipus d'operacions que s'ofereixen són: translacions, escalats, inclinacions, rotacions, perspectives i miralls. Per a les transformacions afins (totes menys la perspectiva) es pot especificar un origen de transformació i per la perspectiva es pot especificar un envolupant sobre el qual actuar. Es dóna la possibilitat d'escollir-ho perquè si volem modificar una capa vectorial sobre un ràster ja modificat, es pugui usar l'envolupant del ràster i superposar així perfectament la capa vectorial transformada sobre el ràster modificat.
És possible realitzar un seguit de transformacions i/o perspectiva una darrera l'altra sobre un ràster o vector amb la única restricció que només es pot usar una perspectiva.
Transformacions geomètriques (afins i perspectiva) (cas vectorial):
quests tipus de transformacions segueixen una filosofia diferent a les anteriors: en comptes d'ajustar la transformació a través d'uns punts de control, volem indicar nosaltres els paràmetres de la transformació ja que els coneixem a priori. Un exemple seria el cas que disposem d'una base vectorial antiga, provinent d'un programari que emmagatzemava les coordenades amb precisió simple (com PC-Arc/Info) i per aquesta causa s'havia truncat la xifra més significativa quan era constant per a tota la capa (per exemple a Catalunya en UTM-31N era habitual suprimir el 4 de la coordenada Y, per la qual cosa una coordenada com ara 4619254.734 s'escrivia 619254.734 i així es podia mantenir una precisió decimètrica; en aquest cas podrem recuperar les coordenades originals indicant una transformació de tipus translació de magnitud 4000000. Finalment, un tercer exemple seria disposar d'una base en què les unitats del sistema de referència horitzontal son km i volem tenir-les en m, per a la qual cosa aplicarem un escalat de valor 1000.
Els tipus d'operacions que s'ofereixen són: translacions, escalats, inclinacions, rotacions, perspectives i miralls. Per a les transformacions afins (totes menys la perspectiva) es pot especificar un origen de transformació i per la perspectiva es pot especificar un envolupant sobre el qual actuar. Es dóna la possibilitat d'escollir-ho perquè si volem modificar una capa vectorial sobre un ràster ja modificat, es pugui usar l'envolupant del ràster i superposar així perfectament la capa vectorial transformada sobre el ràster modificat.
És possible realitzar un seguit de transformacions i/o perspectiva una darrera l'altra sobre un ràster o vector amb la única restricció que només es pot usar una perspectiva.
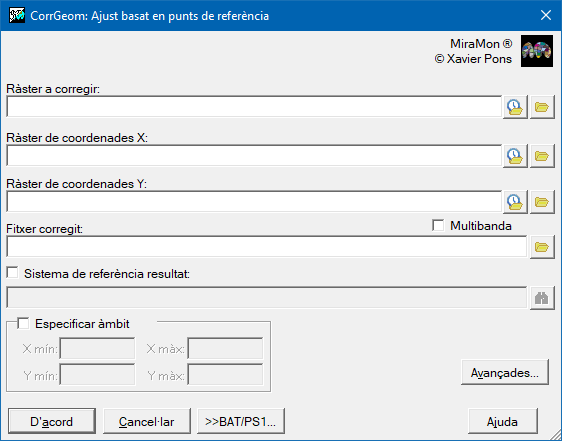
Ajust basat en punts de referència:
En aquest cas, la correcció geomètrica es fa a partir de dos ràsters que, emparellats, proporcionen la posició origen de cada píxel de la imatge destí (per tant, típicament tenen les mateixes dimensions que aquesta) i conjuntament formen, doncs, una malla de referència.
El procediment es basa en el següent: Per a cada centre de píxel del ràster de sortida desitjat (rectificat, corregit, georeferenciat, segons per què serveixin les coordenades) el programa busca els valors d'aquesta posició en els ràsters de referència (un per l'eix de les X i l'altre per l'eix de les Y), cosa que li acaba proporcionant el píxel concret en la imatge a corregir que està més proper a les coordenades dels ràsters de referència. El valor en el ràster origen s'assignarà a aquest píxel del ràster de sortida quan el mètode de remostreig sigui el veí més proper, o s'interpolarà a partir dels veïns en els altres mètodes de remostreig disponibles. Per defecte, el fitxer de sortida tindrà la mateixa envolupant, costat de píxel i sistema de referència que els ràsters de referència XY.
Nota sobre el format dels fitxers COR:
Els fitxers COR contenen els punts de control i, opcionalment, de test, tenen el següent format:
Nombre_de_punts [Coments]
X_SistOri1 Y_SistOri1 X_SistDest1 Y_SistDest1 [Z_SistDest1] [Coments1]
: : : : : :
- La coordenada Z_SistDest1 no és necessària en les dues primeres opcions del programa.
- Els punts de test (optatius) se situaran, amb el mateix format, a sota d'aquesta seqüència. Cal indicar, a l'inici del bloc corresponent, quants n'hi ha.
- El fitxer pot acabar amb comentaris d'extensió indefinida, que el programa no conserva i que són substituïts pels resultats de l'ajust.
- Les coordenades del "Sistema Origen" han de ser cartesianes, és a dir, han de créixer cap a la dreta en x i cap amunt en y. La coordenada 0,0 pot ser situada en qualsevol punt del fitxer origen o fins i tot fora d'ell.
Aquest format pot ser generat amb un editor de text o, més fàcilment, partir d'un fitxer de punts digitalitzats sobre la imatge o vector original a corregir utilitzant el programa VECCOR.
Per imatges ràster i en les opcions del programa que no requereixen la introducció de la resolució ni l'envolupant del fitxer de sortida, aquest hereta aquests paràmetres del MDE. Els valors màxims de l'envolupant del fitxer de sortida s'adapten en funció del valor de la resolució de sortida (res), fent servir la següent expressió:
Xmàxima = Xmínima + res * arrodonir_per_excés((Xmàxima-Xmínima)/res)
Ymàxima = Ymínima + res * arrodonir_per_excés((Ymàxima-Ymínima)/res)
El nombre de columnes i de files de la imatge final poden determinar-se de:
Ncolumnes = (Xmàxima-Xmínima)/res
Nfiles = (Ymàxima-Ymínima)/res
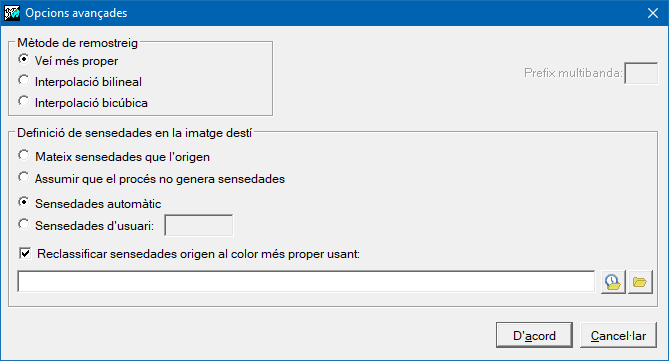
El valor de fons o sensedades és el valor que s'escriurà en el fitxer corregit quan el fitxer a corregir no tingui dades per a les cel·les de sortida a aquella posició. L'usuari pot decidir el valor del sensedades o pot deixar que sigui el programa qui prengui la decisió. En aquest cas, per defecte, serà igual al d'entrada si existís o, si en origen no n'hi ha, 255 per imatges byte/byte-RLE o el valor negatiu més petit possible per als altres formats. Si la imatge a corregir era byte/byte-RLE i no tenia sensedades definit, i en corregir es generen valors sensedades, per defecte els valors originals vàlids que en destí corresponen al sensedades se saturaran. En imatges de 24-bits reduïdes a 8-bits amb paleta optimitzada aquest fet pot provocar una visualització incorrecta i per tant es dóna l'opció que el programa reclassifiqui aquests valors a l'índex de color més proper, de manera que la visualització queda pràcticament inalterada.
El programa suporta models digitals d'elevacions de tipus de dades byte, integer (short) i real, comprimits o no-comprimits.

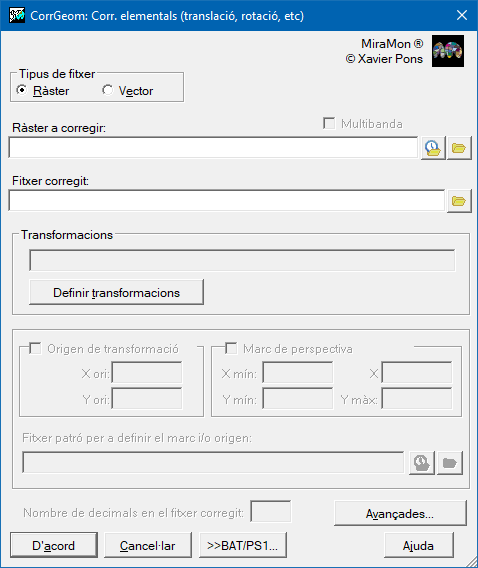
Caixa de diàleg de l'aplicació
 |
 |
 |
 |
 |
 |
 |
| Caixa de diàleg del CorrGeom |
Exemples gràfics
Correccions polinòmiques de primer grau
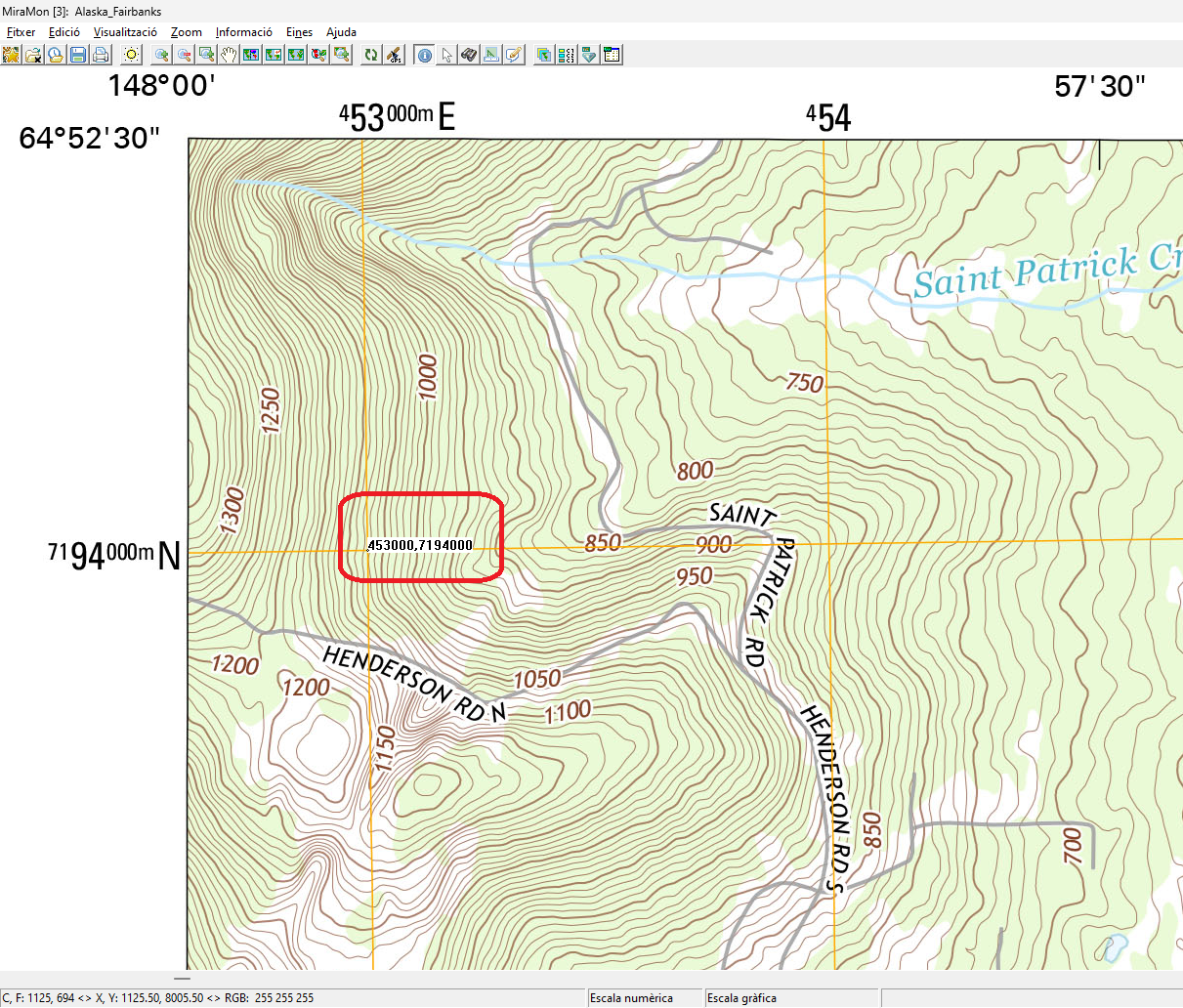 |
Detall de la col·locació d'un punt de control a la coordenada UTM-06N (453000,7194000),
dàtum Amèrica del Nord 1983, en un mapa topogràfic 1:25000 de l'USGS a Alaska Fairbanks.
La col·locació acurada d'un punt a cadascun dels 4 extrems del mapa permet obtenir, georeferenciat,
el document cartogràfic amb un RMS que presenta un ajust de 28 cm amb el document escanejat
(en realitat, com que el mapa és a escala 1:25000 l'RMS real sobre el terreny deu ser d'uns 5 m). |
Correccions polinòmiques amb Z
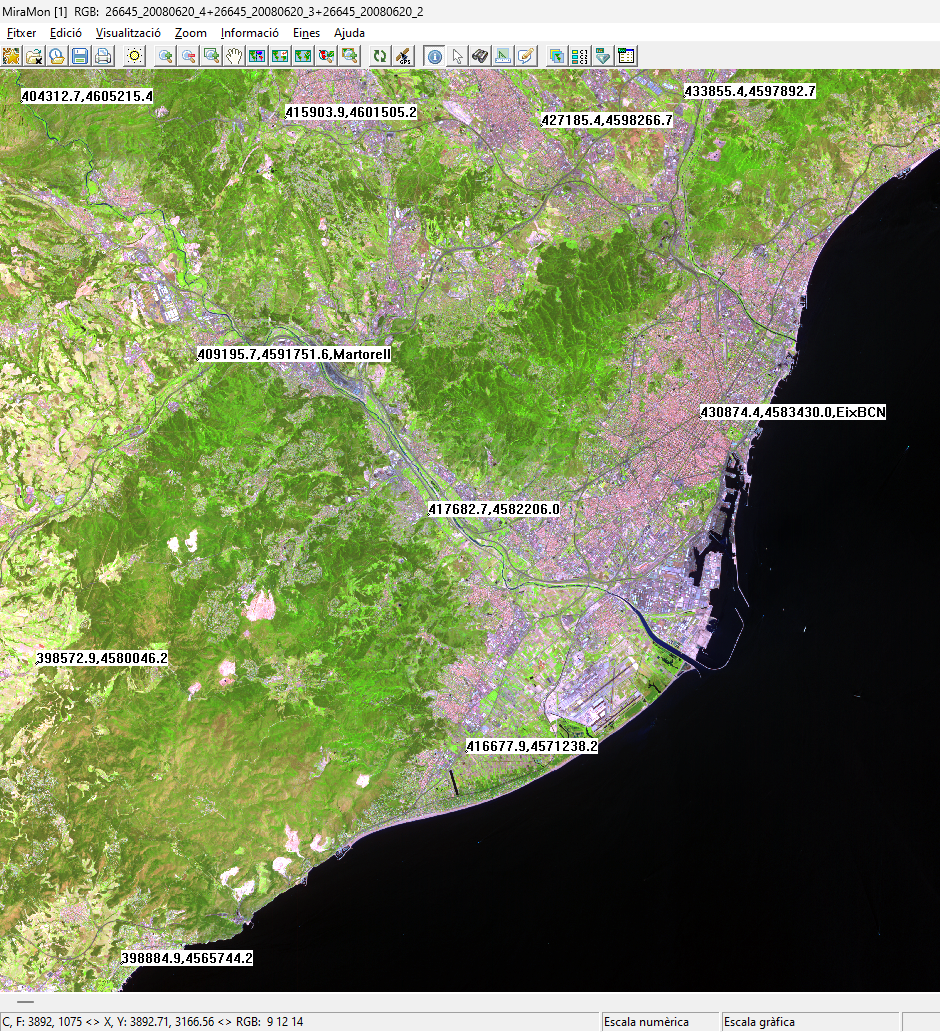 |
 |
| Punts d'ajust ubicats en una imatge SPOT ((c) SPOT-Image) |
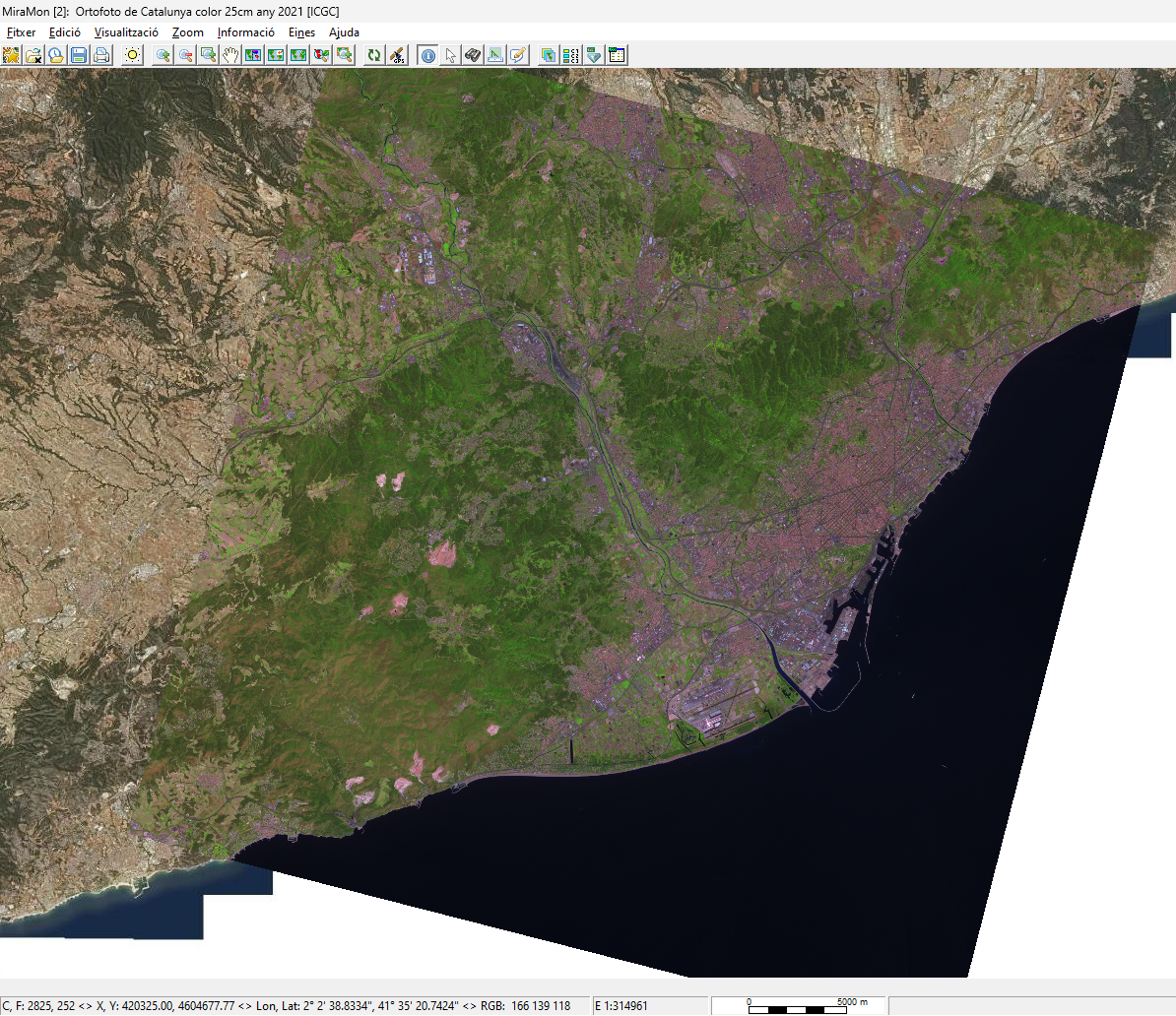
Aspecte general de la correcció de l'anterior imatge SPOT sobre
una ortofoto de l'ICGC (les zones amb sensedades es mostren transparents). |
 |
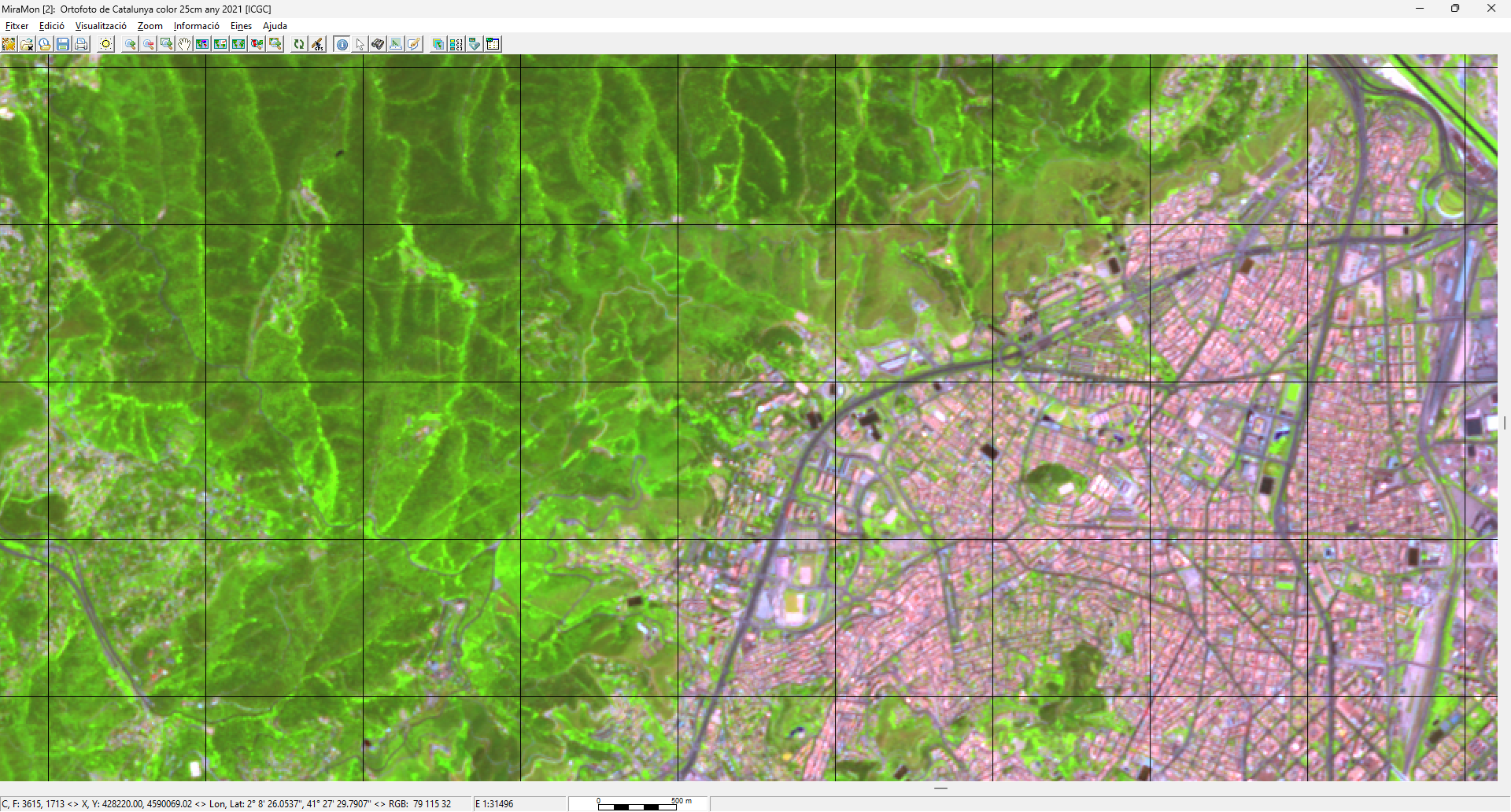 |
| Detall de la correcció de l'anterior imatge SPOT comparada amb una imatge de l'ICGC. La xarxa de referència té un costat d'1 km. |
Correccions amb equacions de col·linealitat
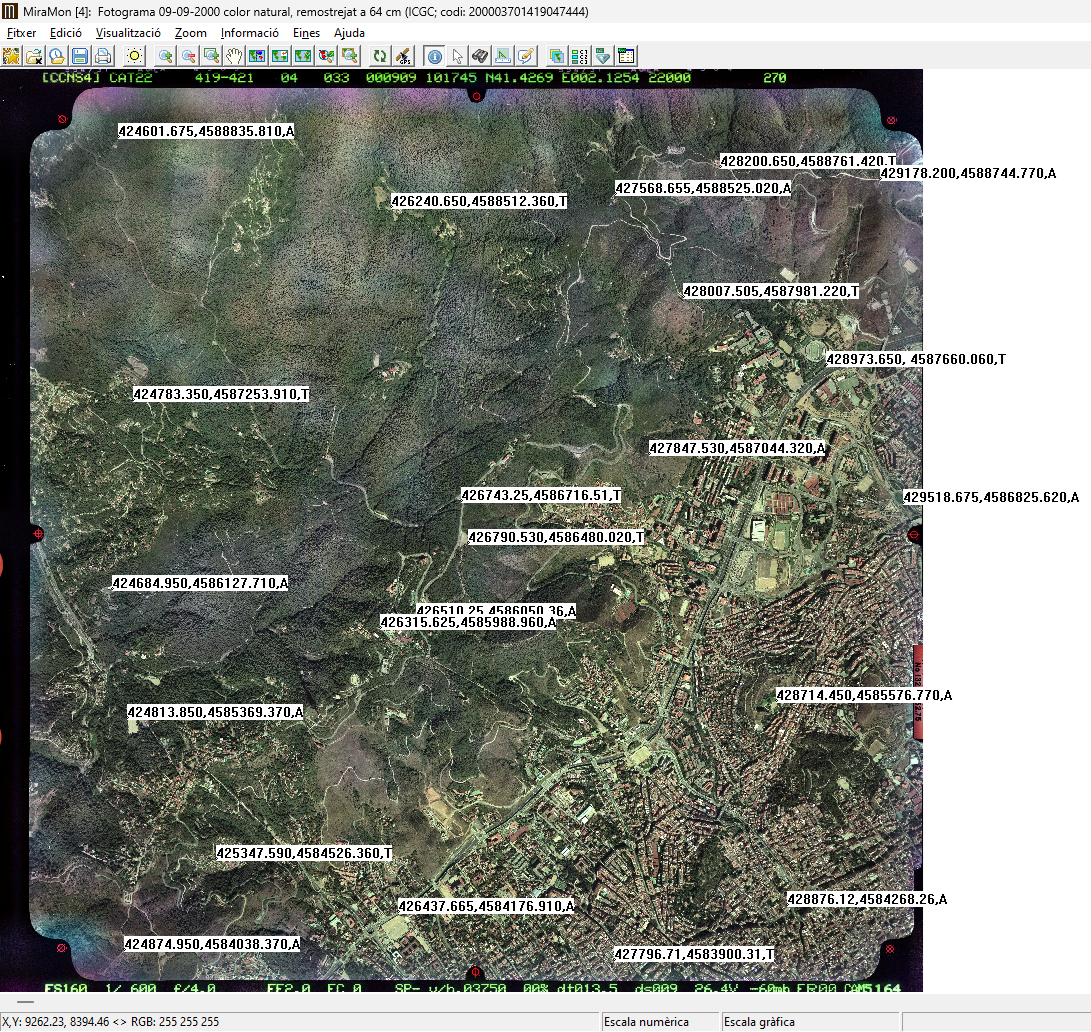 |
 |
| Punts d'ajust (A) i de test (T) ubicats en un fotograma de l'Institut Cartogràfic i Geològic de Catalunya (ICGC). |
Detall de la correcció de l'anterior fotograma, convertit en una ortofoto (esquerra) comparat amb una ortofoto de l'ICGC (dreta) per tal d'apreciar el molt bon encaix geomètric aconseguit. Cada píxel de la imatge correspon a 50 cm. |
Exemples de sintaxi
Per a imatges ràster
CorrGeom 1 MAP MA2 LANDSAT.img LND 0 450000 480500 4724500 4750000 30 /NODATA=0
CorrGeom 2 MAP NUL LANDSAT.img LND 1 X X X X 30
CorrGeom 4 MAP MA2 LANDSAT.img ORTOLND 1 MDE30
CorrGeom 6 MAP MA2 FOTOSCAN.img ORTOFOT 1 MDE05 400 20 153 1475 1512
Per a fitxers vectorials
CorrGeom 1 MUNIPC_1 MUNIPC_2 MUNI_1.pnt MUNI_COR
CorrGeom 2 MUNIPC_1 NUL MUNI_1.arc MUNI_COR
CorrGeom 1 MUNIPC_1 MUNIPC_2 MUNI_1.vec MUNI_COR 0
Per a transformacions geomètriques (afins i perspectiva)
Translació de 6.5 unitats en direcció vertical positiva:
CorrGeom 7 LANDSAT.img LND 0 T 0 6.5
Translació de 7 unitats en direcció horitzontal negativa:
CorrGeom 7 LANDSAT.img LND 0 T -7 0
Rotació de 45 graus en el sentit horari:
CorrGeom 7 LANDSAT.img LND 0 R 45
Rotació de 45 graus en el sentit antihorari:
CorrGeom 7 LANDSAT.img LND 0 R -45
Escalat de raó 2 (en les dues direccions: vertical i horitzontal) més rotació horària de 90 graus:
CorrGeom 7 LANDSAT.img LND 0 E 2 2 R 90
Lleugera inclinació en la direcció horitzontal cap a la dreta:
CorrGeom 7 LANDSAT.img LND 0 I x 0.1
Inclinació del 50% en la direcció horitzontal cap a l'esquerra:
CorrGeom 7 LANDSAT.img LND 0 I x -1
Perspectiva d'uns punts situats sobre un ràster del qual també hem fet perspectiva (de 0.5). Suposem que el ràster té com a envolupant (XMIN, YMIN)=(0,10), (XMAX, YMAX)=(4500, 6000)
CorrGeom 7 MUNI_1.pnt MUNI_COR P 0.5 /XMIN=0 /XMAX=4500 /YMIN=10 /YMAX=6000
Observem que si no apliquéssim aquests paràmetres optatius, els punts no s'adaptarien al ràster modificat.
Rotació d'uns punts situats sobre un ràster del qual també hem fet rotació (de 45 graus). Suposem que el ràster té com a envolupant (XMIN, YMIN)=(0,10), (XMAX, YMAX)=(4500, 6000)
CorrGeom 7 MUNI_1.pnt MUNI_COR R 45 /XORI=0 /YORI=10
Observem que si no apliquéssim aquests paràmetres optatius, els punts no s'adaptarien al ràster modificat.
Escalat de cm a m i després traslladar 4000000 m a les Y's.
Els arguments de les transformacions afins són transformats pel propi programa, per tant, cal pensar-ho com:
Escalatge de cm a m. Traslladar 400000000 cms a les Y.
CorrGeom 7 Fitxer.arc Fitxer_sor.arc E 100 100 T 0 400000000
Per a ajust basat en punts de referència
CorrGeom 8 Fitx_in.img Fitx_out.img Fitx_X.img Fitx_Y.img 0 x x x x
CorrGeom 8 Fitx_multi_in.img Directori Fitx_X.img Fitx_Y.img 0 x x x x /MULTIBANDA /PREFIX=apr_
Sintaxi
Sintaxi:
- CorrGeom 1 FitxCor FitxCorErr FitxRasOri FitxRasSort Remostreig xMin xMax yMin yMax res [/NODATA] [/PALETA] [/MULTIBANDA] [/PREFIX] [/SIST_DEST]
- CorrGeom 1 FitxCor FitxCorErr FitxVecOri FitxVecSort [/N_DECIMALS] [/SIST_DEST]
- CorrGeom 2 FitxCor FitxCorErr FitxRasOri FitxRasSort Remostreig xMin xMax yMin yMax res [/NODATA] [/PALETA] [/MULTIBANDA] [/PREFIX] [/SIST_DEST]
- CorrGeom 2 FitxCor FitxCorErr FitxVecOri FitxVecSort [/N_DECIMALS] [/SIST_DEST]
- CorrGeom 3 FitxCor FitxCorErr FitxRasOri FitxRasSort Remostreig MDE [/NODATA] [/PALETA] [/MULTIBANDA] [/PREFIX] [/MDE_MULTIBANDA]
- CorrGeom 4 FitxCor FitxCorErr FitxRasOri FitxRasSort Remostreig MDE [/NODATA] [/PALETA] [/MULTIBANDA] [/PREFIX] [/MDE_MULTIBANDA]
- CorrGeom 5 FitxCor FitxCorErr FitxRasOri FitxRasSort Remostreig MDE [/NODATA] [/PALETA] [/MULTIBANDA] [/PREFIX] [/MDE_MULTIBANDA]
- CorrGeom 6 FitxCor FitxCorErr FitxRasOri FitxRasSort Remostreig MDE Resolució Iteracions OpcPosició OpcActitud OpcFocal OpcPtPrinc [/XCAM] [/YCAM] [/ZCAM] [/WCAM] [/FCAM] [/KCAM] [/FOCAL] [/ANALOG] [/DIGITAL] [/XPP] [/YPP] [/PMPCONTROL] [/PMRASTER] [/NODATA] [/PALETA] [/MULTIBANDA] [/PREFIX] [/MDE_MULTIBANDA]
- CorrGeom 7 FitxRasOri FitxRasSort Remostreig [T] [Tx] [Ty] [E] [Ex] [Ey] [I] [Id] [Ir] [R] [g] [P] [Pr] [M] [Md] [/NODATA] [/PALETA] [/MULTIBANDA] [/PREFIX] [/MDE_MULTIBANDA] [/YORI] [/XMAX] [/XORI] [/YMIN] [/XMIN] [/YMAX]
- CorrGeom 7 FitxVecOri FitxVecSort [T] [Tx] [Ty] [E] [Ex] [Ey] [I] [Id] [Ir] [R] [g] [P] [Pr] [M] [Md] [/YMIN] [/XMIN] [/YMAX] [/YORI] [/XMAX] [/XORI] [/N_DECIMALS]
- CorrGeom 8 FitxRasOri FitxRasSort FitxCoorX FitxCoorY Remostreig RetXMin RetXMax RetYMin RetYMax [/MULTIBANDA] [/PREFIX] [/NODATA] [/PALETA] [/SIST_DEST]
Opcions:
- 1:
Ajust polinòmic de primer grau (cas ràster).
- 1:
Ajust polinòmic de primer grau (cas vector).
- 2:
Ajust polinòmic de segon grau (cas ràster).
- 2:
Ajust polinòmic de segon grau (cas vector).
- 3:
Ajust amb polinomi amb Z per a les columnes i polinomi de 1r grau sense Z per a les files.
- 4:
Com opció 3 però amb capcineig constant i Z per a les files.
- 5:
Com opció 3 però amb capcineig variable i Z per a les files.
- 6:
Ajust mitjançant equacions de col·linealitat.
- 7:
Transformacions geomètriques (afins i perspectiva) (cas ràster).
- 7:
Transformacions geomètriques (afins i perspectiva) (cas vector).
- 8:
Ajust basat en punts de referència.
Paràmetres:
- FitxCor
(Control -
Paràmetre d'entrada): És el fitxer que conté els punts de control en format COR.
- FitxCorErr
(Control error -
Paràmetre de sortida): És el nom del fitxer COR que contindrà les equacions i els errors de l'ajust i el test. Podeu indicar NUL per correccions automàtiques on no desitgeu generar aquest fitxer.
- FitxRasOri
(Fitxer ràster a corregir -
Paràmetre d'entrada): És el fitxer a corregir (amb extensió).
- FitxRasSort
(Fitxer ràster de sortida -
Paràmetre de sortida): És el nom del fitxer corregit (sense extensió) o el nom del directori dels fitxers corregits pel cas multibanda.
- Remostreig
(Tipus remostreig -
Paràmetre d'entrada): Criteri per a decidir el valor del píxel de sortida (tipus de remostreig), només s'utilitza en imatges ràster:
- 0: Veí més proper (mapes temàtics; preservar radiometria original).
- 1: Interpolació bilineal (imatges per a fotointerpretació; MDE).
- 2: Interpolació bicúbica (com 1; resultats suavitzats però més lent).
- xMin
(X Mínima -
Paràmetre d'entrada): És la coordenada X mínima. Indiqueu 'x x x x' si voleu que el programa les calculi (es corregirà tot el ràster origen).
- xMax
(X Màxima -
Paràmetre d'entrada): És la coordenada X màxima. Indiqueu 'x x x x' si voleu que el programa les calculi (es corregirà tot el ràster origen).
- yMin
(Y mínima -
Paràmetre d'entrada): És la coordenada Y mínima. Indiqueu 'x x x x' si voleu que el programa les calculi (es corregirà tot el ràster origen).
- yMax
(Y màxima -
Paràmetre d'entrada): És la coordenada Y màxima. Indiqueu 'x x x x' si voleu que el programa les calculi (es corregirà tot el ràster origen).
- res
(Resolució de sortida -
Paràmetre d'entrada): Resolució de la imatge de sortida en unitats mapa.
- FitxVecOri
(Fitxer vectorial a corregir -
Paràmetre d'entrada): És el fitxer vectorial a corregir (amb extensió).
- FitxVecSort
(Fitxer vectorial de sortida -
Paràmetre de sortida): És el nom del fitxer corregit (sense extensió).
- MDE
(Model Digital d'Elevacions -
Paràmetre d'entrada): Fitxer ràster amb el model digital d'elevacions de la zona.
- Resolució
(Resolució -
Paràmetre d'entrada): És la resolució en ppp (píxels per polzada o dpi) per imatges escannejades o fotografies digitals.
.
- Iteracions
(Iteracions -
Paràmetre d'entrada): Nombre màxim d'iteracions en el càlcul de l'ajust dels paràmetres de col·linealitat (suggerim 20). .
- OpcPosició
(Opcions de posició -
Paràmetre d'entrada): Opció (de posició) que defineix si els paràmetres implicats en les equacions de col·linealitat són coneguts i fixats (3), són estimats (2) o són desconeguts (0). El valor (1) és pel cas especial de la posició quan només es té un estimació de l'altitud de vol, però no de la posició X,Y de l'avió.
- OpcActitud
(Opcions d'actitud -
Paràmetre d'entrada): Opció (d'actitud) que defineix si els paràmetres implicats en les equacions de col·linealitat són coneguts i fixats (3), són estimats (2) o són desconeguts (0).
- OpcFocal
(Opcions focal -
Paràmetre d'entrada): Opció (de focal) que defineixen si els paràmetres implicats en les equacions de col·linealitat són coneguts i fixats (3), són estimats (2) o són desconeguts (0).
- OpcPtPrinc
(Opcions punt principal -
Paràmetre d'entrada): Opció (punt principal) que defineixen si els paràmetres implicats en les equacions de col·linealitat són coneguts i fixats (3), són estimats (2) o són desconeguts (0).
- T
(Translació -
Paràmetre d'entrada): Indica que la transformació geomètrica a efectuar és una translació.
- Tx
(Valor X -
Paràmetre d'entrada): Valor en les unitats del fitxer d'origen per a la component horitzontal de la translació.
- Ty
(Valor Y -
Paràmetre d'entrada): Valor en les unitats del fitxer d'origen per a la component vertical de la translació.
- E
(Escalat -
Paràmetre d'entrada): Indica que la transformació geomètrica a efectuar és un escalat.
- Ex
(Valor X -
Paràmetre d'entrada): Raó d'escalat horitzontal.
- Ey
(Valor Y -
Paràmetre d'entrada): Raó d'escalat vertical. Ex i Ey no poden valer 0 o 1 simultàniament.Ni Ex ni Ey no poden valer 0 perquè no es permet col·lapsar el resultat en un punt i per tant el programa no accepta aquests valors.
- I
(Inclinació -
Paràmetre d'entrada): Indica que la transformació geomètrica a efectuar és una inclinació.
- Id
(Eix inclinació -
Paràmetre d'entrada): Si volem inclinar en direcció horitzontal el paràmetre ha de ser "x". Si volem inclinar en direcció vertical el paràmetre ha de ser "y"
- Ir
(Raó inclinació -
Paràmetre d'entrada): Indica la raó d'inclinació. El valor 0 indica que no hi ha inclinació i com més alta és la raó més inclinació tenim. També accepta un nombre negatiu. Valors positius indiquen inclinació cap a la dreta (sentit horitzontal) o cap amunt (sentit vertical) i valors negatius indiquen inclinació cap a l'esquerra (sentit horitzontal) o cap avall (sentit vertical).
- R
(Rotació -
Paràmetre d'entrada): Indica que la transformació geomètrica a efectuar és una rotació.
- g
(graus -
Paràmetre d'entrada): Indica els graus de rotació en el sentit horari. Si volem fer-ho en sentit antihorari cal posar el signe "menys" ("-") davant. El rang permès és de -360 a 360 graus.
- P
(Perspectiva -
Paràmetre d'entrada): Indica que la transformació geomètrica a efectuar és una perspectiva.
- Pr
(Raó perspectiva -
Paràmetre d'entrada): Indica la raó de perspectiva. El valor que pren ha de ser un real major o igual que zero i menor estricte que 1. Si el valor és 0, el resultat no es modifica i com més proper a l'1 és, més es deforma tendint un punt de fuga infinit.
- M
(Mirall -
Paràmetre d'entrada): Indica que la transformació geomètrica a efectuar és un mirall.
- Md
(Direcció mirall -
Paràmetre d'entrada): Indica la direcció de mirall. Si volem fer un mirall respecte l'eix horitzontal cal usar el valor 'x' (o bé 'X'). Si volem fer un mirall respecte l'eix vertical cal usar el valor 'y' (o bé 'Y').
- FitxCoorX
(Fitxer coordenades X -
Paràmetre d'entrada): És el nom del fitxer ràster (amb extensió) amb coordenades X on s'ha de buscar el valor al fitxer origen.
- FitxCoorY
(Fitxer coordenades Y -
Paràmetre d'entrada): És el nom del fitxer ràster (amb extensió) amb coordenades Y on s'ha de buscar el valor al fitxer origen.
- RetXMin
(X mínima a retallar -
Paràmetre d'entrada): S'indica la coordenada X mínima de l'àmbit del fitxer destí. Si s'indica 'x', s'escollirà la X mínima del fitxer de coordenades X i Y.
- RetXMax
(X màxima a retallar -
Paràmetre d'entrada): S'indica la coordenada X màxima de l'àmbit del fitxer destí. Si s'indica 'x', s'escollirà la X màxima del fitxer de coordenades X i Y.
- RetYMin
(Y mínima a retallar -
Paràmetre d'entrada): S'indica la coordenada Y mínima de l'àmbit del fitxer destí. Si s'indica 'x', s'escollirà la Y mínima del fitxer de coordenades X i Y.
- RetYMax
(Y màxima a retallar -
Paràmetre d'entrada): S'indica la coordenada Y màxima de l'àmbit del fitxer destí. Si s'indica 'x', s'escollirà la Y màxima del fitxer de coordenades X i Y.
Modificadors:
/XCAM=
(X càmera)
Coordenada X de la càmera o sensor en el sistema de referència destí, tant si són posicions ja conegudes, com valors estimats. Si només s'indica /ZCAM, es fa referència a un valor estimat de l'altitud de vol. (Paràmetre d'entrada) /YCAM=
(Y càmera)
Coordenada Y de la càmera o sensor en el sistema de referència destí, tant si són posicions ja conegudes, com valors estimats. Si només s'indica /ZCAM, es fa referència a un valor estimat de l'altitud de vol. (Paràmetre d'entrada) /ZCAM=
(Z càmera)
Coordenada Z de la càmera o sensor en el sistema de referència destí, tant si són posicions ja conegudes, com valors estimats. Si només s'indica /ZCAM, es fa referència a un valor estimat de l'altitud de vol. (Paràmetre d'entrada) /WCAM=
(Omega)
Indica, en graus, l'angle d'actitud "omega" del sensor, sigui fixat o estimat. (Paràmetre d'entrada) /FCAM=
(Fi)
Indica, en graus, l'angle d'actitud "fi" del sensor, sigui fixat o estimat. (Paràmetre d'entrada) /KCAM=
(Kappa)
Indica, en graus, l'angle d'actitud "kappa" del sensor, sigui fixat o estimat. (Paràmetre d'entrada) /FOCAL=
(Focal)
Distància focal en mm (Paràmetre d'entrada) /ANALOG
(Cambra analògica)
Si la focal de la càmera és desconeguda, conèixer si és digital o analògica (aquest cas) ajuda a prendre un valor inicial que convergeixi més ràpidament al valor ajustat. (Paràmetre d'entrada) /DIGITAL
(Cambra digital)
Si la focal de la cambra és desconeguda, conèixer si és digital o analògica ajuda a prendre un valor inicial que convergeixi més ràpidament al valor ajustat. (Paràmetre d'entrada) /XPP=
(XPP)
Coordenada X conegudes o inicials del punt principal en el sistema de referència origen (Paràmetre d'entrada) /YPP=
(YPP)
Coordenada Y conegudes o inicials del punt principal en el sistema de referència origen (Paràmetre d'entrada) /PMPCONTROL=
(Punt mitjà punts de control)
Si la localització del punt principal és desconeguda, es pot indicar si els valors inicials es calcularan a partir de la mitjana dels punts de control o del punt mitjà de l'envolupant del ràster a corregir (Paràmetre d'entrada) /PMRASTER=
(Punt mitjà ràster)
Punt mitjà ràster (Paràmetre d'entrada) /MDE_MULTIBANDA (Model Digital Elevacions MULTIBANDA) Per a corregir alhora ràsters multibanda que tenen diferents costats de píxel amb un MDE que té una banda per a cada valor no repetit de costat de píxel. (Paràmetre d'entrada) /YMIN= (Y mínima de la zona a aplicar transformació.) Coordenada Y mínima de l'àmbit en el qual volem aplicar la transformació. Només és útil quan realitzem una perspectiva ja que en les transformacions sense perspectiva s'usa /XORI, /YORI. (Paràmetre d'entrada) /XMIN= (X mínima de la zona a aplicar transformació.) Coordenada X mínima de l'àmbit en el qual volem aplicar la transformació. Només és útil quan realitzem una perspectiva ja que en les transformacions sense perspectiva s'usa /XORI, /YORI. (Paràmetre d'entrada) /YMAX= (Y màxima de la zona a aplicar transformació.) Coordenada Y màxima de l'àmbit en el qual volem aplicar la transformació. Només és útil quan realitzem una perspectiva ja que en les transformacions sense perspectiva s'usa /XORI, /YORI. (Paràmetre d'entrada) /YORI= (Origen transformació a l'eix Y) Indica l'origen a l'eix Y de la transformació en el cas que n'hi hagi alguna. (Paràmetre d'entrada) /XMAX= (X màxima de la zona a aplicar transformació.) Coordenada X màxima de l'àmbit en el qual volem aplicar la transformació. Només és útil quan realitzem una perspectiva ja que en les transformacions sense perspectiva s'usa /XORI, /YORI. (Paràmetre d'entrada) /XORI= (Origen transformació a l'eix X) Indica l'origen a l'eix X de la transformació en el cas que n'hi hagi alguna. (Paràmetre d'entrada) /N_DECIMALS= (Nombre de decimals) Nombre de xifres decimals en les coordenades del vector de sortida. Sols s'aplica per fitxers VEC. (Paràmetre d'entrada) /MULTIBANDA (MULTIBANDA) Per a corregir alhora ràsters multibanda i generar com a resultat un ràster multibanda amb les corresponents bandes corregides. Només en el cas ràster. (Paràmetre d'entrada) /PREFIX= (Prefix) Prefix que s'afegeix als noms dels fitxers originals per a determinar els noms dels fitxers corregits per al cas multibanda. Per defecte aquest prefix és c_. (Paràmetre d'entrada) /NODATA= (sensedades) Valor del sensedades per a la imatge corregida. Si l'usuari sap que amb tota seguretat (avaluant la geometria de la transformació, l'àmbit i rang del MDE...) no hi haurà sensedades es pot usar el valor "NONE". (Paràmetre d'entrada) /PALETA= (Paleta) Paleta (p25, pal, p65) o taula de simbolització (dbf) que determinarà quin índex de color és el color més proper a l'índex del sensedades per a la imatge corregida. (Paràmetre d'entrada) /SIST_DEST= (Sistema de referència de destí) Identificador del sistema de projecció del fitxer destí. (Paràmetre d'entrada)